Documentation
Kafka 0.8.0
Documentation for the 0.7 release is here.1. Getting Started
1.1 Introduction
Kafka® is a distributed, partitioned, replicated commit log service. It provides the functionality of a messaging system, but with a unique design.
What does all that mean?
First let's review some basic messaging terminology:
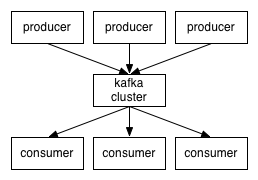
- Kafka maintains feeds of messages in categories called topics.
- We'll call processes that publish messages to a Kafka topic producers.
- We'll call processes that subscribe to topics and process the feed of published messages consumers..
- Kafka is run as a cluster comprised of one or more servers each of which is called a broker.
Topics and Logs
Let's first dive into the high-level abstraction Kafka provides—the topic.A topic is a category or feed name to which messages are published. For each topic, the Kafka cluster maintains a partitioned log that looks like this:
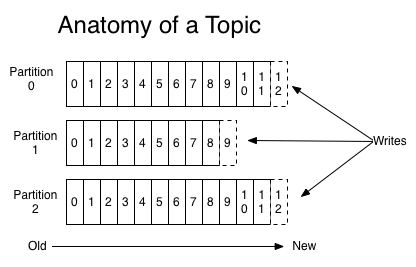
The Kafka cluster retains all published messages—whether or not they have been consumed—for a configurable period of time. For example if the log retention is set to two days, then for the two days after a message is published it is available for consumption, after which it will be discarded to free up space. Kafka's performance is effectively constant with respect to data size so retaining lots of data is not a problem.
In fact the only metadata retained on a per-consumer basis is the position of the consumer in the log, called the "offset". This offset is controlled by the consumer: normally a consumer will advance its offset linearly as it reads messages, but in fact the position is controlled by the consumer and it can consume messages in any order it likes. For example a consumer can reset to an older offset to reprocess.
This combination of features means that Kafka consumers are very cheap—they can come and go without much impact on the cluster or on other consumers. For example, you can use our command line tools to "tail" the contents of any topic without changing what is consumed by any existing consumers.
The partitions in the log serve several purposes. First, they allow the log to scale beyond a size that will fit on a single server. Each individual partition must fit on the servers that host it, but a topic may have many partitions so it can handle an arbitrary amount of data. Second they act as the unit of parallelism—more on that in a bit.
Distribution
The partitions of the log are distributed over the servers in the Kafka cluster with each server handling data and requests for a share of the partitions. Each partition is replicated across a configurable number of servers for fault tolerance.Each partition has one server which acts as the "leader" and zero or more servers which act as "followers". The leader handles all read and write requests for the partition while the followers passively replicate the leader. If the leader fails, one of the followers will automatically become the new leader. Each server acts as a leader for some of its partitions and a follower for others so load is well balanced within the cluster.
Producers
Producers publish data to the topics of their choice. The producer is able to choose which message to assign to which partition within the topic. This can be done in a round-robin fashion simply to balance load or it can be done according to some semantic partition function (say based on some key in the message). More on the use of partitioning in a second.Consumers
Messaging traditionally has two models: queuing and publish-subscribe. In a queue, a pool of consumers may read from a server and each message goes to one of them; in publish-subscribe the message is broadcast to all consumers. Kafka offers a single consumer abstraction that generalizes both of these—the consumer group.Consumers label themselves with a consumer group name, and each message published to a topic is delivered to one consumer instance within each subscribing consumer group. Consumer instances can be in separate processes or on separate machines.
If all the consumer instances have the same consumer group, then this works just like a traditional queue balancing load over the consumers.
If all the consumer instances have different consumer groups, then this works like publish-subscribe and all messages are broadcast to all consumers.
More commonly, however, we have found that topics have a small number of consumer groups, one for each "logical subscriber". Each group is composed of many consumer instances for scalability and fault tolerance. This is nothing more than publish-subscribe semantics where the subscriber is cluster of consumers instead of a single process.
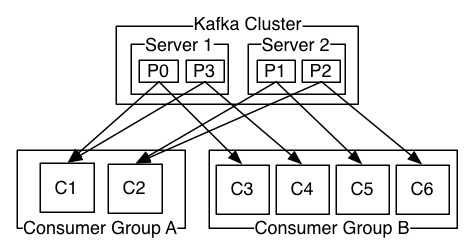
A two server Kafka cluster hosting four partitions (P0-P3) with two consumer groups. Consumer group A has two consumer instances and group B has four.
Kafka has stronger ordering guarantees than a traditional messaging system, too.
A traditional queue retains messages in-order on the server, and if multiple consumers consume from the queue then the server hands out messages in the order they are stored. However, although the server hands out messages in order, the messages are delivered asynchronously to consumers, so they may arrive out of order on different consumers. This effectively means the ordering of the messages is lost in the presence of parallel consumption. Messaging systems often work around this by having a notion of "exclusive consumer" that allows only one process to consume from a queue, but of course this means that there is no parallelism in processing.
Kafka does it better. By having a notion of parallelism—the partition—within the topics, Kafka is able to provide both ordering guarantees and load balancing over a pool of consumer processes. This is achieved by assigning the partitions in the topic to the consumers in the consumer group so that each partition is consumed by exactly one consumer in the group. By doing this we ensure that the consumer is the only reader of that partition and consumes the data in order. Since there are many partitions this still balances the load over many consumer instances. Note however that there cannot be more consumer instances than partitions.
Kafka only provides a total order over messages within a partition. This combined with the ability to partition data by key is sufficient for the vast majority of applications. However, if you require a total order over messages this can be achieved with a topic that has only one partition, though this will mean only one consumer process.
Guarantees
At a high-level Kafka gives the following guarantees:- Messages sent by a producer to a particular topic partition will be appended in the order they are sent. That is, if a message M1 is sent by the same producer as a message M2, and M1 is sent first, then M1 will have a lower offset than M2 and appear earlier in the log.
- A consumer instance sees messages in the order they are stored in the log.
- For a topic with replication factor N, we will tolerate up to N-1 server failures without losing any messages committed to the log.
1.2 Use Cases
Here is a description of a few of the popular use cases for Apache Kafka. For an overview of a number of these areas in action, see this paper.Messaging
Kafka works well as a replacement for a more traditional message broker. Message brokers are used for a variety of reasons (to decouple processing from data producers, to buffer unprocessed messages, etc). In comparison to most messaging systems Kafka has better throughput, built-in partitioning, replication, and fault-tolerance which makes it a good solution for large scale message processing applications.In our experience messaging uses are often comparatively low-throughput, but may require low end-to-end latency and often depend on the strong durability guarantees Kafka provides.
Website Activity Tracking
The original use case for Kafka was to be able to rebuild a user activity tracking pipeline as a set of real-time publish-subscribe feeds. This means site activity (page views, searches, or other actions users may take) is published to central topics with one topic per activity type. These feeds are available for subscription for a range of use cases including real-time processing, real-time monitoring, and loading into Hadoop or offline data warehousing systems for offline processing and reporting.Activity tracking is often very high volume as many activity messages are generated for each user page view.
Metrics
Kafka is often used for operation monitoring data pipelines. This involves aggregating statistics from distributed applications to produce centralized feeds of operational data.Log Aggregation
Many people use Kafka as a replacement for a log aggregation solution. Log aggregation typically collects physical log files off servers and puts them in a central place (a file server or HDFS perhaps) for processing. Kafka abstracts away the details of files and gives a cleaner abstraction of log or event data as a stream of messages. This allows for lower-latency processing and easier support for multiple data sources and distributed data consumption. In comparison to log-centric systems like Scribe or Flume, Kafka offers equally good performance, stronger durability guarantees due to replication, and much lower end-to-end latency.Stream Processing
Many users end up doing stage-wise processing of data where data is consumed from topics of raw data and then aggregated, enriched, or otherwise transformed into new Kafka topics for further consumption. For example a processing flow for article recommendation might crawl article content from RSS feeds and publish it to an "articles" topic; further processing might help normalize or deduplicate this content to a topic of cleaned article content; a final stage might attempt to match this content to users. This creates a graph of real-time data flow out of the individual topics. The Storm framework is one popular way for implementing some of these transformations.1.3 Quick Start
Step 1: Download the code
Download the 0.8 release.> tar xzf kafka-<VERSION>.tgz > cd kafka-<VERSION> > ./sbt update > ./sbt package > ./sbt assembly-package-dependencyThis tutorial assumes you are starting on a fresh zookeeper instance with no pre-existing data. If you want to migrate from an existing 0.7 installation you will need to follow the migration instructions.
Step 2: Start the server
Kafka uses zookeeper so you need to first start a zookeeper server if you don't already have one. You can use the convenience script packaged with kafka to get a quick-and-dirty single-node zookeeper instance.
> bin/zookeeper-server-start.sh config/zookeeper.properties [2013-04-22 15:01:37,495] INFO Reading configuration from: config/zookeeper.properties (org.apache.zookeeper.server.quorum.QuorumPeerConfig) ...Now start the Kafka server:
> bin/kafka-server-start.sh config/server.properties [2013-04-22 15:01:47,028] INFO Verifying properties (kafka.utils.VerifiableProperties) [2013-04-22 15:01:47,051] INFO Property socket.send.buffer.bytes is overridden to 1048576 (kafka.utils.VerifiableProperties) ...
Step 3: Create a topic
Let's create a topic named "test" with a single partition and only one replica:> bin/kafka-create-topic.sh --zookeeper localhost:2181 --replica 1 --partition 1 --topic testWe can now see that topic if we run the list topic command:
> bin/kafka-list-topic.sh --zookeeper localhost:2181Alternatively, you can also configure your brokers to auto-create topics when a non-existent topic is published to.
Step 4: Send some messages
Kafka comes with a command line client that will take input from a file or standard in and send it out as messages to the Kafka cluster. By default each line will be sent as a separate message.Run the producer and then type a few messages to send to the server.
> bin/kafka-console-producer.sh --broker-list localhost:9092 --topic test This is a message This is another message
Step 5: Start a consumer
Kafka also has a command line consumer that will dump out messages to standard out.> bin/kafka-console-consumer.sh --zookeeper localhost:2181 --topic test --from-beginning This is a message This is another message
If you have each of the above commands running in a different terminal then you should now be able to type messages into the producer terminal and see them appear in the consumer terminal.
All the command line tools have additional options; running the command with no arguments will display usage information documenting them in more detail.
Step 6: Setting up a multi-broker cluster
So far we have been running against a single broker, but that's no fun. For Kafka, a single broker is just a cluster of size one, so nothing much changes other than starting a few more broker instances. But just to get feel for it, let's expand our cluster to three nodes (still all on our local machine).First we make a config file for each of the brokers:
> cp config/server.properties config/server-1.properties > cp config/server.properties config/server-2.propertiesNow edit these new files and set the following properties:
config/server-1.properties:
broker.id=1
port=9093
log.dir=/tmp/kafka-logs-1
config/server-2.properties:
broker.id=2
port=9094
log.dir=/tmp/kafka-logs-2
The broker.id property is the unique and permanent name of each node in the cluster. We have to override the port and log directory only because we are running these all on the same machine and we want to keep the brokers from trying to all register on the same port or overwrite each others data.
We already have Zookeeper and our single node started, so we just need to start the two new nodes. However, this time we have to override the JMX port used by java too to avoid clashes with the running node:
> JMX_PORT=9997 bin/kafka-server-start.sh config/server-1.properties & ... > JMX_PORT=9998 bin/kafka-server-start.sh config/server-2.properties & ...Now create a new topic with a replication factor of three:
> bin/kafka-create-topic.sh --zookeeper localhost:2181 --replica 3 --partition 1 --topic my-replicated-topicOkay but now that we have a cluster how can we know which broker is doing what? To see that run the "list topics" command:
> bin/kafka-list-topic.sh --zookeeper localhost:2181 topic: my-replicated-topic partition: 0 leader: 1 replicas: 1,2,0 isr: 1,2,0 topic: test partition: 0 leader: 0 replicas: 0 isr: 0Here is an explanation of output:
- "leader" is the node responsible for all reads and writes for the given partition. Each node would be the leader for a randomly selected portion of the partitions.
- "replicas" is the list of nodes that are supposed to server the log for this partition regardless of whether they are currently alive.
- "isr" is the set of "in-sync" replicas. This is the subset of the replicas list that is currently alive and caught-up to the leader.
As before let's publish a few messages message:
> bin/kafka-console-producer.sh --broker-list localhost:9092 --topic my-replicated-topic ... my test message 1 my test message 2 ^CNow consume this message:
> bin/kafka-console-consumer.sh --zookeeper localhost:2181 --from-beginning --topic my-replicated-topic ... my test message 1 my test message 2 ^CNow let's test out fault-tolerance. Kill the broker acting as leader for this topic's only partition:
> pkill -9 -f server-1.propertiesLeadership should switch to one of the slaves:
> bin/kafka-list-topic.sh --zookeeper localhost:2181 ... topic: my-replicated-topic partition: 0 leader: 2 replicas: 1,2,0 isr: 2 topic: test partition: 0 leader: 0 replicas: 0 isr: 0And the messages should still be available for consumption even though the leader that took the writes originally is down:
> bin/kafka-console-consumer.sh --zookeeper localhost:2181 --from-beginning --topic my-replicated-topic ... my test message 1 my test message 2 ^C
2. API
2.1 Producer API
/**
* V: type of the message
* K: type of the optional key associated with the message
*/
class kafka.javaapi.producer.Producer<K,V>
{
public Producer(ProducerConfig config);
/**
* Sends the data to a single topic, partitioned by key, using either the
* synchronous or the asynchronous producer
* @param message the producer data object that encapsulates the topic, key and message data
*/
public void send(KeyedMessage<K,V> message);
/**
* Use this API to send data to multiple topics
* @param messages list of producer data objects that encapsulate the topic, key and message data
*/
public void send(List<KeyedMessage<K,V>> messages);
/**
* Close API to close the producer pool connections to all Kafka brokers.
*/
public void close();
}
You can follow
this example to learn how to use the producer api.
2.2 High Level Consumer API
class Consumer {
/**
* Create a ConsumerConnector
*
* @param config at the minimum, need to specify the groupid of the consumer and the zookeeper
* connection string zookeeper.connect.
*/
public static kafka.javaapi.consumer.ConsumerConnector createJavaConsumerConnector(config: ConsumerConfig);
}
/**
* V: type of the message
* K: type of the optional key assciated with the message
*/
public interface kafka.javaapi.consumer.ConsumerConnector {
/**
* Create a list of message streams of type T for each topic.
*
* @param topicCountMap a map of (topic, #streams) pair
* @param decoder a decoder that converts from Message to T
* @return a map of (topic, list of KafkaStream) pairs.
* The number of items in the list is #streams. Each stream supports
* an iterator over message/metadata pairs.
*/
public <K,V> Map<String, List<KafkaStream<K,V>>>
createMessageStreams(Map<String, Integer> topicCountMap, Decoder<K> keyDecoder, Decoder<V> valueDecoder);
/**
* Create a list of message streams of type T for each topic, using the default decoder.
*/
public Map<String, List<KafkaStream<byte[], byte[]>>> createMessageStreams(Map<String, Integer> topicCountMap);
/**
* Create a list of message streams for topics matching a wildcard.
*
* @param topicFilter a TopicFilter that specifies which topics to
* subscribe to (encapsulates a whitelist or a blacklist).
* @param numStreams the number of message streams to return.
* @param keyDecoder a decoder that decodes the message key
* @param valueDecoder a decoder that decodes the message itself
* @return a list of KafkaStream. Each stream supports an
* iterator over its MessageAndMetadata elements.
*/
public <K,V> List<KafkaStream<K,V>>
createMessageStreamsByFilter(TopicFilter topicFilter, int numStreams, Decoder<K> keyDecoder, Decoder<V> valueDecoder);
/**
* Create a list of message streams for topics matching a wildcard, using the default decoder.
*/
public List<KafkaStream<byte[], byte[]>> createMessageStreamsByFilter(TopicFilter topicFilter, int numStreams);
/**
* Create a list of message streams for topics matching a wildcard, using the default decoder, with one stream.
*/
public List<KafkaStream<byte[], byte[]>> createMessageStreamsByFilter(TopicFilter topicFilter);
/**
* Commit the offsets of all topic/partitions connected by this connector.
*/
public void commitOffsets();
/**
* Shut down the connector
*/
public void shutdown();
}
You can follow
this example to learn how to use the high level consumer api.
2.3 Simple Consumer API
class kafka.javaapi.consumer.SimpleConsumer {
/**
* Fetch a set of messages from a topic.
*
* @param request specifies the topic name, topic partition, starting byte offset, maximum bytes to be fetched.
* @return a set of fetched messages
*/
public FetchResponse fetch(request: kafka.javaapi.FetchRequest);
/**
* Fetch metadata for a sequence of topics.
*
* @param request specifies the versionId, clientId, sequence of topics.
* @return metadata for each topic in the request.
*/
public kafka.javaapi.TopicMetadataResponse send(request: kafka.javaapi.TopicMetadataRequest);
/**
* Get a list of valid offsets (up to maxSize) before the given time.
*
* @param request a [[kafka.javaapi.OffsetRequest]] object.
* @return a [[kafka.javaapi.OffsetResponse]] object.
*/
public kafka.javaapi.OffsetResponse getOffsetsBefore(request: OffsetRequest);
/**
* Close the SimpleConsumer.
*/
public void close();
}
For most applications, the high level consumer Api is good enough. Some applications want features not exposed to the high level consumer yet (e.g., set initial offset when restarting the consumer). They can instead use our low level SimpleConsumer Api. The logic will be a bit more complicated and you can follow the example in
here.
2.4 Kafka Hadoop Consumer API
Providing a horizontally scalable solution for aggregating and loading data into Hadoop was one of our basic use cases. To support this use case, we provide a Hadoop-based consumer which spawns off many map tasks to pull data from the Kafka cluster in parallel. This provides extremely fast pull-based Hadoop data load capabilities (we were able to fully saturate the network with only a handful of Kafka servers).
Usage information on the Hadoop consumer can be found here. In addition to the Apache Kafka contrib Hadoop Consumer, there is also an open source project that integrates Hadoop/HDFS using MapReduce to get messages out of Kafka using Avro here that was open sourced by LinkedIn.
3. Configuration
Kafka uses the property file format for configuration. These can be supplied either from a file or programmatically.Some configurations have both a default global setting as well as a topic-level overrides. The topic level properties have the format of csv (e.g., "xyz.per.topic=topic1:value1,topic2:value2") and they override the default value for the specified topics.
3.1 Broker Configs
The essential configurations are the following:broker.idlog.dirszookeeper.connect
| Property | Default | Description |
|---|---|---|
| broker.id | Each broker is uniquely identified by a non-negative integer id. This id serves as the brokers "name" and allows the broker to be moved to a different host/port without confusing consumers. You can choose any number you like so long as it is unique. | |
| log.dirs | /tmp/kafka-logs | A comma-separated list of one or more directories in which Kafka data is stored. Each new partition that is created will be placed in the directory which currently has the fewest partitions. |
| port | 6667 | The port on which the server accepts client connections. |
| zookeeper.connect | null | Specifies the zookeeper connection string in the form hostname:port, where hostname and port are the host and port for a node in your zookeeper cluster. To allow connecting through other zookeeper nodes when that host is down you can also specify multiple hosts in the form hostname1:port1,hostname2:port2,hostname3:port3.
Zookeeper also allows you to add a "chroot" path which will make all kafka data for this cluster appear under a particular path. This is a way to setup multiple Kafka clusters or other applications on the same zookeeper cluster. To do this give a connection string in the form |
| message.max.bytes | 1000000 | The maximum size of a message that the server can receive. It is important that this property be in sync with the maximum fetch size your consumers use or else an unruly producer will be able to publish messages too large for consumers to consume. |
| num.network.threads | 3 | The number of network threads that the server uses for handling network requests. You probably don't need to change this. |
| num.io.threads | 8 | The number of I/O threads that the server uses for executing requests. You should have at least as many threads as you have disks. |
| queued.max.requests | 500 | The number of requests that can be queued up for processing by the I/O threads before the network threads stop reading in new requests. |
| host.name | null |
Hostname of broker. If this is set, it will only bind to this address. If this is not set, it will bind to all interfaces, and publish one to ZK. |
| socket.send.buffer.bytes | 100 * 1024 | The SO_SNDBUFF buffer the server prefers for socket connections. |
| socket.receive.buffer.bytes | 100 * 1024 | The SO_RCVBUFF buffer the server prefers for socket connections. |
| socket.request.max.bytes | 100 * 1024 * 1024 | The maximum request size the server will allow. This prevents the server from running out of memory and should be smaller than the Java heap size. |
| num.partitions | 1 | The default number of partitions per topic. |
| log.segment.bytes | 1024 * 1024 * 1024 | The log for a topic partition is stored as a directory of segment files. This setting controls the size to which a segment file will grow before a new segment is rolled over in the log. |
| log.segment.bytes.per.topic | "" | This setting allows overriding log.segment.bytes on a per-topic basis. |
| log.roll.hours | 24 * 7 | This setting will force Kafka to roll a new log segment even if the log.segment.bytes size has not been reached. |
| log.roll.hours.per.topic | "" | This setting allows overriding log.roll.hours on a per-topic basis. |
| log.retention.hours | 24 * 7 | The number of hours to keep a log segment before it is deleted, i.e. the default data retention window for all topics. Note that if both log.retention.hours and log.retention.bytes are both set we delete a segment when either limit is exceeded. |
| log.retention.hours.per.topic | "" | A per-topic override for log.retention.hours. |
| log.retention.bytes | -1 | The amount of data to retain in the log for each topic-partitions. Note that this is the limit per-partition so multiply by the number of partitions to get the total data retained for the topic. Also note that if both log.retention.hours and log.retention.bytes are both set we delete a segment when either limit is exceeded. |
| log.retention.bytes.per.topic | "" | A per-topic override for log.retention.bytes. |
| log.retention.check.interval.ms | 300000 | The frequency in milliseconds that the log cleaner checks whether any log segment is eligible for deletion to meet the retention policies. |
| log.index.size.max.bytes | 10 * 1024 * 1024 | The maximum size in bytes we allow for the offset index for each log segment. Note that we will always pre-allocate a sparse file with this much space and shrink it down when the log rolls. If the index fills up we will roll a new log segment even if we haven't reached the log.segment.bytes limit. |
| log.index.interval.bytes | 4096 | The byte interval at which we add an entry to the offset index. When executing a fetch request the server must do a linear scan for up to this many bytes to find the correct position in the log to begin and end the fetch. So setting this value to be larger will mean larger index files (and a bit more memory usage) but less scanning. However the server will never add more than one index entry per log append (even if more than log.index.interval worth of messages are appended). In general you probably don't need to mess with this value. |
| log.flush.interval.messages | 10000 | The number of messages written to a log partition before we force an fsync on the log. Setting this higher will improve performance a lot but will increase the window of data at risk in the event of a crash (though that is usually best addressed through replication). If both this setting and log.flush.interval.ms are both used the log will be flushed when either criteria is met. |
| log.flush.interval.ms.per.topic | "" | The per-topic override for log.flush.interval.messages, e.g., topic1:3000,topic2:6000 |
| log.flush.scheduler.interval.ms | 3000 | The frequency in ms that the log flusher checks whether any log is eligible to be flushed to disk. |
| log.flush.interval.ms | 3000 | The maximum time between fsync calls on the log. If used in conjuction with log.flush.interval.messages the log will be flushed when either criteria is met. |
| auto.create.topics.enable | true | Enable auto creation of topic on the server. If this is set to true then attempts to produce, consume, or fetch metadata for a non-existent topic will automatically create it with the default replication factor and number of partitions. |
| controller.socket.timeout.ms | 30000 | The socket timeout for commands from the partition management controller to the replicas. |
| controller.message.queue.size | 10 | The buffer size for controller-to-broker-channels |
| default.replication.factor | 1 | The default replication factor for automatically created topics. |
| replica.lag.time.max.ms | 10000 | If a follower hasn't sent any fetch requests for this window of time, the leader will remove the follower from ISR (in-sync replicas) and treat it as dead. |
| replica.lag.max.messages | 4000 | If a replica falls more than this many messages behind the leader, the leader will remove the follower from ISR and treat it as dead. |
| replica.socket.timeout.ms | 30 * 1000 | The socket timeout for network requests to the leader for replicating data. |
| replica.socket.receive.buffer.bytes | 64 * 1024 | The socket receive buffer for network requests to the leader for replicating data. |
| replica.fetch.max.bytes | 1024 * 1024 | The number of byes of messages to attempt to fetch for each partition in the fetch requests the replicas send to the leader. |
| replica.fetch.wait.max.ms | 500 | The maximum amount of time to wait time for data to arrive on the leader in the fetch requests sent by the replicas to the leader. |
| replica.fetch.min.bytes | 1 | Minimum bytes expected for each fetch response for the fetch requests from the replica to the leader. If not enough bytes, wait up to replica.fetch.wait.max.ms for this many bytes to arrive. |
| num.replica.fetchers | 1 |
Number of threads used to replicate messages from leaders. Increasing this value can increase the degree of I/O parallelism in the follower broker. |
| replica.high.watermark.checkpoint.interval.ms | 5000 | The frequency with which each replica saves its high watermark to disk to handle recovery. |
| fetch.purgatory.purge.interval.requests | 10000 | The purge interval (in number of requests) of the fetch request purgatory. |
| producer.purgatory.purge.interval.requests | 10000 | The purge interval (in number of requests) of the producer request purgatory. |
| zookeeper.session.timeout.ms | 6000 | Zookeeper session timeout. If the server fails to heartbeat to zookeeper within this period of time it is considered dead. If you set this too low the server may be falsely considered dead; if you set it too high it may take too long to recognize a truly dead server. |
| zookeeper.connection.timeout.ms | 6000 | The maximum amount of time that the client waits to establish a connection to zookeeper. |
| zookeeper.sync.time.ms | 2000 | How far a ZK follower can be behind a ZK leader. |
| controlled.shutdown.enable | false | Enable controlled shutdown of the broker. If enabled, the broker will move all leaders on it to some other brokers before shutting itself down. This reduces the unavailability window during shutdown. |
| controlled.shutdown.max.retries | 3 | Number of retries to complete the controlled shutdown successfully before executing an unclean shutdown. |
| controlled.shutdown.retry.backoff.ms | 5000 | Backoff time between shutdown retries. |
More details about broker configuration can be found in the scala class kafka.server.KafkaConfig.
3.2 Consumer Configs
The essential consumer configurations are the following:group.idzookeeper.connect
| Property | Default | Description |
|---|---|---|
| group.id | A string that uniquely identifies the group of consumer processes to which this consumer belongs. By setting the same group id multiple processes indicate that they are all part of the same consumer group. | |
| zookeeper.connect | Specifies the zookeeper connection string in the form hostname:port where host and port are the host and port of a zookeeper server. To allow connecting through other zookeeper nodes when that zookeeper machine is down you can also specify multiple hosts in the form hostname1:port1,hostname2:port2,hostname3:port3.
The server may also have a zookeeper chroot path as part of it's zookeeper connection string which puts its data under some path in the global zookeeper namespace. If so the consumer should use the same chroot path in its connection string. For example to give a chroot path of |
|
| consumer.id | null |
Generated automatically if not set. |
| socket.timeout.ms | 30 * 1000 | The socket timeout for network requests. The actual timeout set will be max.fetch.wait + socket.timeout.ms. |
| socket.receive.buffer.bytes | 64 * 1024 | The socket receive buffer for network requests |
| fetch.message.max.bytes | 1024 * 1024 | The number of byes of messages to attempt to fetch for each topic-partition in each fetch request. These bytes will be read into memory for each partition, so this helps control the memory used by the consumer. The fetch request size must be at least as large as the maximum message size the server allows or else it is possible for the producer to send messages larger than the consumer can fetch. |
| auto.commit.enable | true | If true, periodically commit to zookeeper the offset of messages already fetched by the consumer. This committed offset will be used when the process fails as the position from which the new consumer will begin. |
| auto.commit.interval.ms | 60 * 1000 | The frequency in ms that the consumer offsets are committed to zookeeper. |
| queued.max.message.chunks | 10 | Max number of message chunks buffered for consumption. Each chunk can be up to fetch.message.max.bytes. |
| rebalance.max.retries | 4 | When a new consumer joins a consumer group the set of consumers attempt to "rebalance" the load to assign partitions to each consumer. If the set of consumers changes while this assignment is taking place the rebalance will fail and retry. This setting controls the maximum number of attempts before giving up. |
| fetch.min.bytes | 1 | The minimum amount of data the server should return for a fetch request. If insufficient data is available the request will wait for that much data to accumulate before answering the request. |
| fetch.wait.max.ms | 100 | The maximum amount of time the server will block before answering the fetch request if there isn't sufficient data to immediately satisfy fetch.min.bytes |
| rebalance.backoff.ms | 2000 | Backoff time between retries during rebalance. |
| refresh.leader.backoff.ms | 200 | Backoff time to wait before trying to determine the leader of a partition that has just lost its leader. |
| auto.offset.reset | largest |
What to do when there is no initial offset in Zookeeper or if an offset is out of range: |
| consumer.timeout.ms | -1 | Throw a timeout exception to the consumer if no message is available for consumption after the specified interval |
| client.id | group id value | The client id is a user-specified string sent in each request to help trace calls. It should logically identify the application making the request. |
| zookeeper.session.timeout.ms | 6000 | Zookeeper session timeout. If the consumer fails to heartbeat to zookeeper for this period of time it is considered dead and a rebalance will occur. |
| zookeeper.connection.timeout.ms | 6000 | The max time that the client waits while establishing a connection to zookeeper. |
| zookeeper.sync.time.ms | 2000 | How far a ZK follower can be behind a ZK leader |
More details about consumer configuration can be found in the scala class kafka.consumer.ConsumerConfig.
3.3 Producer Configs
Essential configuration properties for the producer include:metadata.broker.listrequest.required.acksproducer.typeserializer.class
| Property | Default | Description |
|---|---|---|
| metadata.broker.list |
This is for bootstrapping and the producer will only use it for getting metadata (topics, partitions and replicas). The socket connections for sending the actual data will be established based on the broker information returned in the metadata. The format is host1:port1,host2:port2, and the list can be a subset of brokers or a VIP pointing to a subset of brokers. |
|
| request.required.acks | 0 |
This value controls when a produce request is considered completed. Specifically, how many other brokers must have committed the data to their log and acknowledged this to the leader? Typical values are
|
| request.timeout.ms | 10000 | The amount of time the broker will wait trying to meet the request.required.acks requirement before sending back an error to the client. |
| producer.type | sync |
This parameter specifies whether the messages are sent asynchronously in a background thread. Valid values are (1) async for asynchronous send and (2) sync for synchronous send. By setting the producer to async we allow batching together of requests (which is great for throughput) but open the possibility of a failure of the client machine dropping unsent data. |
| serializer.class | kafka.serializer.DefaultEncoder | The serializer class for messages. The default encoder takes a byte[] and returns the same byte[]. |
| key.serializer.class | The serializer class for keys (defaults to the same as for messages if nothing is given). | |
| partitioner.class | kafka.producer.DefaultPartitioner | The partitioner class for partitioning messages amongst sub-topics. The default partitioner is based on the hash of the key. |
| compression.codec | none |
This parameter allows you to specify the compression codec for all data generated by this producer. Valid values are "none", "gzip" and "snappy". |
| compressed.topics | null |
This parameter allows you to set whether compression should be turned on for particular topics. If the compression codec is anything other than NoCompressionCodec, enable compression only for specified topics if any. If the list of compressed topics is empty, then enable the specified compression codec for all topics. If the compression codec is NoCompressionCodec, compression is disabled for all topics |
| message.send.max.retries | 3 |
This property will cause the producer to automatically retry a failed send request. This property specifies the number of retries when such failures occur. Note that setting a non-zero value here can lead to duplicates in the case of network errors that cause a message to be sent but the acknowledgement to be lost. |
| retry.backoff.ms | 100 |
Before each retry, the producer refreshes the metadata of relevant topics to see if a new leader has been elected. Since leader election takes a bit of time, this property specifies the amount of time that the producer waits before refreshing the metadata. |
| topic.metadata.refresh.interval.ms | 600 * 1000 |
The producer generally refreshes the topic metadata from brokers when there is a failure (partition missing, leader not available...). It will also poll regularly (default: every 10min so 600000ms). If you set this to a negative value, metadata will only get refreshed on failure. If you set this to zero, the metadata will get refreshed after each message sent (not recommended). Important note: the refresh happen only AFTER the message is sent, so if the producer never sends a message the metadata is never refreshed |
| queue.buffering.max.ms | 5000 | Maximum time to buffer data when using async mode. For example a setting of 100 will try to batch together 100ms of messages to send at once. This will improve throughput but adds message delivery latency due to the buffering. |
| queue.buffering.max.messages | 10000 | The maximum number of unsent messages that can be queued up the producer when using async mode before either the producer must be blocked or data must be dropped. |
| queue.enqueue.timeout.ms | -1 |
The amount of time to block before dropping messages when running in async mode and the buffer has reached queue.buffering.max.messages. If set to 0 events will be enqueued immediately or dropped if the queue is full (the producer send call will never block). If set to -1 the producer will block indefinitely and never willingly drop a send. |
| batch.num.messages | 200 | The number of messages to send in one batch when using async mode. The producer will wait until either this number of messages are ready to send or queue.buffer.max.ms is reached. |
| send.buffer.bytes | 100 * 1024 | Socket write buffer size |
| client.id | "" | The client id is a user-specified string sent in each request to help trace calls. It should logically identify the application making the request. |
More details about producer configuration can be found in the scala class kafka.producer.ProducerConfig.
4. Design
4.1 Motivation
We designed Kafka to be able to act as a unified platform for handling all the real-time data feeds a large company might have. To do this we had to think through a fairly broad set of use cases.
It would have to have high-throughput to support high volume event streams such as real-time log aggregation.
It would need to deal gracefully with large data backlogs to be able to support periodic data loads from offline systems.
It also meant the system would have to handle low-latency delivery to handle more traditional messaging use-cases.
We wanted to support partitioned, distributed, real-time processing of these feeds to create new, derived feeds. This motivated our partitioning and consumer model.
Finally in cases where the stream is fed into other data systems for serving we knew the system would have to be able to guarantee fault-tolerance in the presence of machine failures.
Supporting these uses led us to a design with a number of unique elements, more akin to a database log then a traditional messaging system. We will outline some elements of the design in the following sections.
4.2 Persistence
Don't fear the filesystem!
Kafka relies heavily on the filesystem for storing and caching messages. There is a general perception that "disks are slow" which makes people skeptical that a persistent structure can offer competitive performance. In fact disks are both much slower and much faster than people expect depending on how they are used; and a properly designed disk structure can often be as fast as the network.
The key fact about disk performance is that the throughput of hard drives has been diverging from the latency of a disk seek for the last decade. As a result the performance of linear writes on a JBOD configuration with six 7200rpm SATA RAID-5 array is about 600MB/sec but the performance of random writes is only about 100k/sec—a difference of over 6000X. These linear reads and writes are the most predictable of all usage patterns, and are heavily optimized by the operating system. A modern operating system provides read-ahead and write-behind techniques that prefetch data in large block multiples and group smaller logical writes into large physical writes. A further discussion of this issue can be found in this ACM Queue article; they actually find that sequential disk access can in some cases be faster than random memory access!
{kind=link}
To compensate for this performance divergence modern operating systems have become increasingly aggressive in their use of main memory for disk caching. A modern OS will happily divert all free memory to disk caching with little performance penalty when the memory is reclaimed. All disk reads and writes will go through this unified cache. This feature cannot easily be turned off without using direct I/O, so even if a process maintains an in-process cache of the data, this data will likely be duplicated in OS pagecache, effectively storing everything twice.
Furthermore we are building on top of the JVM, and anyone who has spent any time with Java memory usage knows two things:
- The memory overhead of objects is very high, often doubling the size of the data stored (or worse).
- Java garbage collection becomes increasingly fiddly and slow as the in-heap data increases.
As a result of these factors using the filesystem and relying on pagecache is superior to maintaining an in-memory cache or other structure—we at least double the available cache by having automatic access to all free memory, and likely double again by storing a compact byte structure rather than individual objects. Doing so will result in a cache of up to 28-30GB on a 32GB machine without GC penalties. Furthermore this cache will stay warm even if the service is restarted, whereas the in-process cache will need to be rebuilt in memory (which for a 10GB cache may take 10 minutes) or else it will need to start with a completely cold cache (which likely means terrible initial performance). This also greatly simplifies the code as all logic for maintaining coherency between the cache and filesystem is now in the OS, which tends to do so more efficiently and more correctly than one-off in-process attempts. If your disk usage favors linear reads then read-ahead is effectively pre-populating this cache with useful data on each disk read.
This suggests a design which is very simple: rather than maintain as much as possible in-memory and flush it all out to the filesystem in a panic when we run out of space, we invert that. All data is immediately written to a persistent log on the filesystem without necessarily flushing to disk. In effect this just means that it is transferred into the kernel's pagecache.
This style of pagecache-centric design is described in an article on the design of Varnish here (along with a healthy dose of arrogance).
Constant Time Suffices
The persistent data structure used in messaging systems are often a per-consumer queue with an associated BTree or other general-purpose random access data structures to maintain metadata about messages. BTrees are the most versatile data structure available, and make it possible to support a wide variety of transactional and non-transactional semantics in the messaging system. They do come with a fairly high cost, though: Btree operations are O(log N). Normally O(log N) is considered essentially equivalent to constant time, but this is not true for disk operations. Disk seeks come at 10 ms a pop, and each disk can do only one seek at a time so parallelism is limited. Hence even a handful of disk seeks leads to very high overhead. Since storage systems mix very fast cached operations with very slow physical disk operations, the observed performance of tree structures is often superlinear as data increases with fixed cache--i.e. doubling your data makes things much worse then twice as slow.
Intuitively a persistent queue could be built on simple reads and appends to files as is commonly the case with logging solutions. This structure has the advantage that all operations are O(1) and reads do not block writes or each other. This has obvious performance advantages since the performance is completely decoupled from the data size—one server can now take full advantage of a number of cheap, low-rotational speed 1+TB SATA drives. Though they have poor seek performance, these drives have acceptable performance for large reads and writes and come at 1/3 the price and 3x the capacity.
Having access to virtually unlimited disk space without any performance penalty means that we can provide some features not usually found in a messaging system. For example, in Kafka, instead of attempting to deleting messages as soon as they are consumed, we can retain messages for a relative long period (say a week). This leads to a great deal of flexibility for consumers, as we will describe.
4.3 Efficiency
We have put significant effort into efficiency. One of our primary use cases is handling web activity data, which is very high volume: each page view may generate dozens of writes. Furthermore we assume each message published is read by at least one consumer (often many), hence we strive to make consumption as cheap as possible.
We have also found, from experience building and running a number of similar systems, that efficiency is a key to effective multi-tenant operations. If the downstream infrastructure service can easily become a bottleneck due to a small bump in usage by the application, such small changes will often create problems. By being very fast we help ensure that the application will tip-over under load before the infrastructure. This is particularly important when trying to run a centralized service that supports dozens or hundreds of applications on a centralized cluster as changes in usage patterns are a near-daily occurrence.
We discussed disk efficiency in the previous section. Once poor disk access patterns have been eliminated, there are two common causes of inefficiency in this type of system: too many small I/O operations, and excessive byte copying.
The small I/O problem happens both between the client and the server and in the server's own persistent operations.
To avoid this, our protocol is built around a "message set" abstraction that naturally groups messages together. This allows network requests to group messages together and amortize the overhead of the network roundtrip rather than sending a single message at a time. The server in turn appends chunks of messages to its log in one go, and the consumer fetches large linear chunks at a time.
This simple optimization produces orders of magnitude speed up. Batching leads to larger network packets, larger sequential disk operations, contiguous memory blocks, and so on, all of which allows Kafka to turn a bursty stream of random message writes into linear writes that flow to the consumers.
The other inefficiency is in byte copying. At low message rates this is not an issue, but under load the impact is significant. To avoid this we employ a standardized binary message format that is shared by the producer, the broker, and the consumer (so data chunks can be transferred without modification between them).
The message log maintained by the broker is itself just a directory of files, each populated by a sequence of message sets that have been written to disk in the same format used by the producer and consumer. Maintaining this common format allows optimization of the most important operation: network transfer of persistent log chunks. Modern unix operating systems offer a highly optimized code path for transferring data out of pagecache to a socket; in Linux this is done with the sendfile system call.
To understand the impact of sendfile, it is important to understand the common data path for transfer of data from file to socket:
- The operating system reads data from the disk into pagecache in kernel space
- The application reads the data from kernel space into a user-space buffer
- The application writes the data back into kernel space into a socket buffer
- The operating system copies the data from the socket buffer to the NIC buffer where it is sent over the network
This is clearly inefficient, there are four copies and two system calls. Using sendfile, this re-copying is avoided by allowing the OS to send the data from pagecache to the network directly. So in this optimized path, only the final copy to the NIC buffer is needed.
We expect a common use case to be multiple consumers on a topic. Using the zero-copy optimization above, data is copied into pagecache exactly once and reused on each consumption instead of being stored in memory and copied out to kernel space every time it is read. This allows messages to be consumed at a rate that approaches the limit of the network connection.
This combination of pagecache and sendfile means that on a Kafka cluster where the consumers are mostly caught up you will see no read activity on the disks whatsoever as they will be serving data entirely from cache.
For more background on the sendfile and zero-copy support in Java, see this article.
End-to-end Batch Compression
In some cases the bottleneck is actually not CPU or disk but network bandwidth. This is particularly true for a data pipeline that needs to send messages between data centers over a wide-area network. Of course the user can always compress its messages one at a time without any support needed from Kafka, but this can lead to very poor compression ratios as much of the redundancy is due to repetition between messages of the same type (e.g. field names in JSON or user agents in web logs or common string values). Efficient compression requires compressing multiple messages together rather than compressing each message individually.
Kafka supports this by allowing recursive message sets. A batch of messages can be clumped together compressed and sent to the server in this form. This batch of messages will be written in compressed form and will remain compressed in the log and will only be decompressed by the consumer.
Kafka supports GZIP and Snappy compression protocols. More details on compression can be found here.
4.4 The Producer
Load balancing
The producer sends data directly to the broker that is the leader for the partition without any intervening routing tier. To help the producer do this all Kafka nodes can answer a request for metadata about which servers are alive and where the leaders for the partitions of a topic are at any given time to allow the producer to appropriate direct its requests.
The client controls which partition it publishes messages to. This can be done at random, implementing a kind of random load balancing, or it can be done by some semantic partitioning function. We expose the interface for semantic partitioning by allowing the user to specify a key to partition by and using this to hash to a partition (there is also an option to override the partition function if need be). For example if the key chosen was a user id then all data for a given user would be sent to the same partition. This in turn will allow consumers to make locality assumptions about their consumption. This style of partitioning is explicitly designed to allow locality-sensitive processing in consumers.
Asynchronous send
Batching is one of the big drivers of efficiency, and to enable batching the Kafka producer has an asynchronous mode that accumulates data in memory and sends out larger batches in a single request. The batching can be configured to accumulate no more than a fixed number of messages and to wait no longer than some fixed latency bound (say 100 messages or 5 seconds). This allows the accumulation of more bytes to send, and few larger I/O operations on the servers. Since this buffering happens in the client it obviously reduces the durability as any data buffered in memory and not yet sent will be lost in the event of a producer crash.
4.5 The Consumer
The Kafka consumer works by issuing "fetch" requests to the brokers leading the partitions it wants to consume. The consumer specifies its position in the log with each request and receives back a chunk of log beginning at that position. The consumer thus has significant control over this position and can rewind it to re-consume data if need be.Push vs. pull
An initial question we considered is whether consumers should pull data from brokers or brokers should push data to the consumer. In this respect Kafka follows a more traditional design, shared by most messaging systems, where data is pushed to the broker from the producer and pulled from the broker by the consumer. Some logging-centric systems, such as scribe and flume follow a very different push based path where data is pushed downstream. There are pros and cons to both approaches. However a push-based system has difficulty dealing with diverse consumers as the broker controls the rate at which data is transferred. The goal is generally for the consumer to be able to consume at the maximum possible rate; unfortunately in a push system this means the consumer tends to be overwhelmed when its rate of consumption falls below the rate of production (a denial of service attack, in essence). A pull-based system has the nicer property that the consumer simply falls behind and catches up when it can. This can be mitigated with some kind of backoff protocol by which the consumer can indicate it is overwhelmed, but getting the rate of transfer to fully utilize (but never over-utilize) the consumer is trickier than it seems. Previous attempts at building systems in this fashion led us to go with a more traditional pull model.
Another advantage of a pull-based system is that it lends itself to aggressive batching of data sent to the consumer. A push-based system must choose to either send a request immediately or accumulate more data and then send it later without knowledge of whether the downstream consumer will be able to immediately process it. If tuned for low latency this will result in sending a single message at a time only for the transfer to end up being buffered anyway, which is wasteful. A pull-based design fixes this as the consumer always pulls all available messages after its current position in the log (or up to some configurable max size). So one gets optimal batching without introducing unnecessary latency.
The deficiency of a naive pull-based system is that if the broker has no data the consumer may end up polling in a tight loop, effectively busy-waiting for data to arrive. To avoid this we have parameters in our pull request that allow the consumer request to block in a "long poll" waiting until data arrives (and optionally waiting until a given number of bytes is available to ensure large transfer sizes).
You could imagine other possible designs which would be only pull, end-to-end. The producer would locally write to a local log, and brokers would pull from that with consumers pulling from them. A similar type of "store-and-forward" producer is often proposed. This is intriguing but we felt not very suitable for our target use cases which have thousands of producers. Our experience running persistent data systems at scale led us to feel that involving thousands of disks in the system across many applications would not actually make things more reliable and would be a nightmare to operate. And in practice we have found that we can run a pipeline with strong SLAs at large scale without a need for producer persistence.
Consumer Position
Keeping track of what has been consumed, is, surprisingly, one of the key performance points of a messaging system.Most messaging systems keep metadata about what messages have been consumed on the broker. That is, as a message is handed out to a consumer, the broker either records that fact locally immediately or it may wait for acknowledgement from the consumer. This is a fairly intuitive choice, and indeed for a single machine server it is not clear where else this state could go. Since the data structure used for storage in many messaging systems scale poorly, this is also a pragmatic choice--since the broker knows what is consumed it can immediately delete it, keeping the data size small.
What is perhaps not obvious, is that getting the broker and consumer to come into agreement about what has been consumed is not a trivial problem. If the broker records a message as consumed immediately every time it is handed out over the network, then if the consumer fails to process the message (say because it crashes or the request times out or whatever) that message will be lost. To solve this problem, many messaging systems add an acknowledgement feature which means that messages are only marked as sent not consumed when they are sent; the broker waits for a specific acknowledgement from the consumer to record the message as consumed. This strategy fixes the problem of losing messages, but creates new problems. First of all, if the consumer processes the message but fails before it can send an acknowledgement then the message will be consumed twice. The second problem is around performance, now the broker must keep multiple states about every single message (first to lock it so it is not given out a second time, and then to mark it as permanently consumed so that it can be removed). Tricky problems must be dealt with, like what to do with messages that are sent but never acknowledged.
Kafka handles this differently. Our topic is divided into a set of totally ordered partitions, each of which is consumed by one consumer at any given time. This means that the position of consumer in each partition is just a single integer, the offset of the next message to consume. This makes the state about what has been consumed very small, just one number for each partition. This state can be periodically checkpointed. This makes the equivalent of message acknowledgements very cheap.
There is a side benefit of this decision. A consumer can deliberately rewind back to an old offset and re-consume data. This violates the common contract of a queue, but turns out to be an essential feature for many consumers. For example, if the consumer code has a bug and is discovered after some messages are consumed, the consumer can re-consume those messages once the bug is fixed.
Offline Data Load
Scalable persistence allows for the possibility of consumers that only periodically consume such as batch data loads that periodically bulk-load data into an offline system such as Hadoop or a relational data warehouse.In the case of Hadoop we parallelize the data load by splitting the load over individual map tasks, one for each node/topic/partition combination, allowing full parallelism in the loading. Hadoop provides the task management, and tasks which fail can restart without danger of duplicate data—they simply restart from their original position.
4.6 Message Delivery Semantics
Now that we understand a little about how producers and consumers work, let's discuss the semantic guarantees Kafka provides between producer and consumer. Clearly there are multiple possible message delivery guarantees that could be provided:
- At most once—Messages may be lost but are never redelivered.
- At least once—Messages are never lost but may be redelivered.
- Exactly once—this is what people actually want, each message is delivered once and only once.
Many systems claim to provide "exactly once" delivery semantics, but it is important to read the fine print, most of these claims are misleading (i.e. they don't translate to the case where consumers or producers can fail, or cases where there are multiple consumer processes, or cases where data written to disk can be lost).
Kafka's semantics are straight-forward. When publishing a message we have a notion of the message being "committed" to the log. Once a published message is committed it will not be lost as long as one broker that replicates the partition to which this message was written remains "alive". The definition of alive as well as a description of which types of failures we attempt to handle will be described in more detail in the next section. For now let's assume a perfect, lossless broker and try to understand the guarantees to the producer and consumer. If a producer attempts to publish a message and experiences a network error it cannot be sure if this error happened before or after the message was committed. This is similar to the semantics of inserting into a database table with an autogenerated key.
These are not the strongest possible semantics for publishers. Although we cannot be sure of what happened in the case of a network error, it is possible to allow the producer to generate a sort of "primary key" that makes retrying the produce request idempotent. This feature is not trivial for a replicated system because of course it must work even (or especially) in the case of a server failure. With this feature it would suffice for the producer to retry until it receives acknowledgement of a successfully committed message at which point we would guarantee the message had been published exactly once. We hope to add this in a future Kafka version.
Not all use cases require such strong guarantees. For uses which are latency sensitive we allow the producer to specify the durability level it desires. If the producer specifies that it wants to wait on the message being committed this can take on the order of 10 ms. However the producer can also specify that it wants to perform the send completely asynchronously or that it wants to wait only until the leader (but not necessarily the followers) have the message.
Now let's describe the semantics from the point-of-view of the consumer. All replicas have the exact same log with the same offsets. The consumer controls its position in this log. If the consumer never crashed it could just store this position in memory, but if the producer fails and we want this topic partition to be taken over by another process the new process will need to choose an appropriate position from which to start processing. Let's say the consumer reads some messages -- it has several options for processing the messages and updating its position.
- It can read the messages, then save its position in the log, and finally process the messages. In this case there is a possibility that the consumer process crashes after saving its position but before saving the output of its message processing. In this case the process that took over processing would start at the saved position even though a few messages prior to that position had not been processed. This corresponds to "at-most-once" semantics as in the case of a consumer failure messages may not be processed.
- It can read the messages, process the messages, and finally save its position. In this case there is a possibility that the consumer process crashes after processing messages but before saving its position. In this case when the new process takes over the first few messages it receives will already have been processed. This corresponds to the "at-least-once" semantics in the case of consumer failure. In many cases messages have a primary key and so the updates are idempotent (receiving the same message twice just overwrites a record with another copy of itself).
- So what about exactly once semantics (i.e. the thing you actually want)? The limitation here is not actually a feature of the messaging system but rather the need to co-ordinate the consumer's position with what is actually stored as output. The classic way of achieving this would be to introduce a two-phase commit between the storage for the consumer position and the storage of the consumers output. But this can be handled more simply and generally by simply letting the consumer store its offset in the same place as its output. This is better because many of the output systems a consumer might want to write to will not support a two-phase commit. As an example of this, our Hadoop ETL that populates data in HDFS stores its offsets in HDFS with the data it reads so that it is guaranteed that either data and offsets are both updated or neither is. We follow similar patterns for many other data systems which require these stronger semantics and for which the messages do not have a primary key to allow for deduplication.
So effectively Kafka guarantees at-least-once delivery by default and allows the user to implement at most once delivery by disabling retries on the producer and committing its offset prior to processing a batch of messages. Exactly-once delivery requires co-operation with the destination storage system but Kafka provides the offset which makes implementing this straight-forward.
4.7 Replication
Kafka replicates the log for each topic's partitions across a configurable number of servers (you can set this replication factor on a topic-by-topic basis). This allows automatic failover to these replicas when a server in the cluster fails so messages remain available in the presence of failures.
Other messaging systems provide some replication-related features, but, in our (totally biased) opinion, this appears to be a tacked-on thing, not heavily used, and with large downsides: slaves are inactive, throughput is heavily impacted, it requires fiddly manual configuration, etc. Kafka is meant to be used with replication by default—in fact we implement un-replicated topics as replicated topics where the replication factor is one.
The unit of replication is the topic partition. Under non-failure conditions, each partition in Kafka has a single leader and zero or more followers. The total number of replicas including the leader constitute the replication factor. All reads and writes go to the leader of the partition. Typically, there are many more partitions than brokers and the leaders are evenly distributed among brokers. The logs on the followers are identical to the leader's log—all have the same offsets and messages in the same order (though, of course, at any given time the leader may have a few as-yet unreplicated messages at the end of its log).
Followers consume messages from the leader just as a normal Kafka consumer would and apply them to their own log. Having the followers pull from the leader has the nice property of allowing the follower to naturally batch together log entries they are applying to their log.
As with most distributed systems automatically handling failures requires having a precise definition of what it means for a node to be "alive". For Kafka node liveness has two conditions
- A node must be able to maintain its session with Zookeeper (via Zookeeper's heartbeat mechanism)
- If it is a slave it must replicate the writes happening on the leader and not fall "too far" behind
In distributed systems terminology we only attempt to handle a "fail/recover" model of failures where nodes suddenly cease working and then later recover (perhaps without knowing that they have died). Kafka does not handle so-called "Byzantine" failures in which nodes produce arbitrary or malicious responses (perhaps due to bugs or foul play).
A message is considered "committed" when all in sync replicas for that partition have applied it to their log. Only committed messages are ever given out to the consumer. This means that the consumer need not worry about potentially seeing a message that could be lost if the leader fails. Producers, on the other hand, have the option of either waiting for the message to be committed or not, depending on their preference for tradeoff between latency and durability. This preference is controlled by the request.required.acks setting that the producer uses.
The guarantee that Kafka offers is that a committed message will not be lost, as long as there is at least one in sync replica alive, at all times.
Kafka will remain available in the presence of node failures after a short fail-over period, but may not remain available in the presence of network partitions.
Replicated Logs: Quorums, ISRs, and State Machines (Oh my!)
At its heart a Kafka partition is a replicated log. The replicated log is one of the most basic primitives in distributed data systems, and there are many approaches for implementing one. A replicated log can be used by other systems as a primitive for implementing other distributed systems in the state-machine style.A replicated log models the process of coming into consensus on the order of a series of values (generally numbering the log entries 0, 1, 2, ...). There are many ways to implement this, but the simplest and fastest is with a leader who chooses the ordering of values provided to it. As long as the leader remains alive, all followers need to only copy the values and ordering, the leader chooses.
Of course if leaders didn't fail we wouldn't need followers! When the leader does die we need to choose a new leader from among the followers. But followers themselves may fall behind or crash so we must ensure we choose an up-to-date follower. The fundamental guarantee a log replication algorithm must provide is that if we tell the client a message is committed, and the leader fails, the new leader we elect must also have that message. This yields a tradeoff: if the leader waits for more followers to acknowledge a message before declaring it committed then there will be more potentially electable leaders.
If you choose the number of acknowledgements required and the number of logs that must be compared to elect a leader such that there is guaranteed to be an overlap, then this is called a Quorum.
A common approach to this tradeoff is to use a majority vote for both the commit decision and the leader election. This is not what Kafka does, but let's explore it anyway to understand the tradeoffs. Let's say we have 2f+1 replicas. If f+1 replicas must receive a message prior to a commit being declared by the leader, and if we elect a new leader by electing the follower with the most complete log from at least f+1 replicas, then, with no more than f failures, the leader is guaranteed to have all committed messages. This is because among any f+1 replicas, there must be at least one replica that contains all committed messages. That replica's log will be the most complete and therefore will be selected as the new leader. There are many remaining details that each algorithm must handle (such as precisely defined what makes a log more complete, ensuring log consistency during leader failure or changing the set of servers in the replica set) but we will ignore these for now.
This majority vote approach has a very nice property: the latency is dependent on only the fastest servers. That is, if the replication factor is three, the latency is determined by the faster slave not the slower one.
There are a rich variety of algorithms in this family including Zookeeper's Zab, Raft, and Viewstamped Replication. The most similar academic publication we are aware of to Kafka's actual implementation is PacificA from Microsoft.
The downside of majority vote is that it doesn't take many failures to leave you with no electable leaders. To tolerate one failure requires three copies of the data, and to tolerate two failures requires five copies of the data. In our experience having only enough redundancy to tolerate a single failure is not enough for a practical system, but doing every write five times, with 5x the disk space requirements and 1/5th the throughput, is not very practical for large volume data problems. This is likely why quorum algorithms more commonly appear for shared cluster configuration such as Zookeeper but are less common for primary data storage. For example in HDFS the namenode's high-availability feature is built on a majority-vote-based journal, but this more expensive approach is not used for the data itself.
Kafka takes a slightly different approach to choosing its quorum set. Instead of majority vote, Kafka dynamically maintains a set of in-sync replicas (ISR) that are caught-up to the leader. Only members of this set are eligible for election as leader. A write to a Kafka partition is not considered committed until all in-sync replicas have received the write. This ISR set is persisted to zookeeper whenever it changes. Because of this, any replica in the ISR is eligible to be elected leader. This is an important factor for Kafka's usage model where there are many partitions and ensuring leadership balance is important. With this ISR model and f+1 replicas, a Kafka topic can tolerate f failures without losing committed messages.
For most use cases we hope to handle, we think this tradeoff is a reasonable one. In practice, to tolerate f failures, both the majority vote and the ISR approach will wait for the same number of replicas to acknowledge before committing a message (e.g. to survive one failure a majority quorum needs three replicas and one acknowledgement and the ISR approach requires two replicas and one acknowledgement). The ability to commit without the slowest servers is an advantage of the majority vote approach. However, we think it is ameliorated by allowing the client to choose whether they block on the message commit or not, and the additional throughput and disk space due to the lower required replication factor is worth it.
Another important design distinction is that Kafka does not require that crashed nodes recover with all their data intact. It is not uncommon for replication algorithms in this space to depend on the existence of "stable storage" that cannot be lost in any failure-recovery scenario without potential consistency violations. There are two primary problems with this assumption. First, disk errors are the most common problem we observe in real operation of persistent data systems and they often do not leave data intact. Secondly, even if this were not a problem, we do not want to require the use of fsync on every write for our consistency guarantees as this can reduce performance by two to three orders of magnitude. Our protocol for allowing a replica to rejoin the ISR ensures that before rejoining, it must fully re-sync again even if it lost unflushed data in its crash.
Unclean leader election: What if they all die?
Note that Kafka's guarantee with respect to data loss is predicated on at least on replica remaining in sync. If the current leader dies and no remaining live replicas are in the ISR, this guarantee no longer holds. If your have more than one replica assigned to a partiiton, this should be relatively rare since at least two brokers have to fail for this to happen.However a practical system needs to do something reasonable when all in-sync replicas die. If you are unlucky enough to have this occur, it is important to consider what will happen. There are two behaviors that could be implemented:
- Wait for a replica in the ISR to come back to life and choose this replica as the leader (hopefully it still has all its data).
- Choose the first replica (not necessarily in the ISR) that comes back to life as the leader.
This is a simple tradeoff between availability and consistency. If we wait for replicas in the ISR, then we will remain unavailable as long as those replicas are down. If such replicas were destroyed or their data was lost, then we are permanently down. If, on the other hand, a non-in-sync replica comes back to life and we allow it to become the leader, then its log becomes the source of truth even though it is not guaranteed to have every committed message. In our current release we choose the second strategy and favor choosing a potentially inconsistent replica when all replicas in the ISR are dead. In the future, we would like to make this configurable to better support use cases where downtime is preferable to inconsistency.
This dilemma is not specific to Kafka. It exists in any quorum-based scheme. For example in a majority voting scheme, if a majority of servers suffer a permanent failure, then you must either choose to lose 100% of your data or violate consistency by taking what remains on an existing server as your new source of truth.
Replica Management
The above discussion on replicated logs really covers only a single log, i.e. one topic partition. However a Kafka cluster will manage hundreds or thousands of these partitions. We attempt to balance partitions within a cluster in a round-robin fashion to avoid clustering all partitions for high-volume topics on a small number of nodes. Likewise we try to balance leadership so that each node is the leader for a proportional share of its partitions.It is also important to optimize the leadership election process as that is the critical window of unavailability. A naive implementation of leader election would end up running an election per partition for all partitions a node hosted when that node failed. Instead, we elect one of the brokers as the "controller". This controller detects failures at the broker level and is responsible for changing the leader of all affected partitions in a failed broker. The result is that we are able to batch together many of the required leadership change notifications which makes the election process far cheaper and faster for a large number of partitions. If the controller fails, one of the surviving brokers will become the new controller.
5. Implementation
5.1 API Design
Producer APIs
The Producer API that wraps the 2 low-level producers - kafka.producer.SyncProducer and kafka.producer.async.AsyncProducer.
class ProducerThe goal is to expose all the producer functionality through a single API to the client. The new producer -{ /* Sends the data, partitioned by key to the topic using either the */ /* synchronous or the asynchronous producer */ public void send(kafka.javaapi.producer.ProducerData<K,V> producerData); /* Sends a list of data, partitioned by key to the topic using either */ /* the synchronous or the asynchronous producer */ public void send(java.util.List<kafka.javaapi.producer.ProducerData<K,V>> producerData); /* Closes the producer and cleans up */ public void close(); }
- can handle queueing/buffering of multiple producer requests and asynchronous dispatch of the batched data -
kafka.producer.Producerprovides the ability to batch multiple produce requests (producer.type=async), before serializing and dispatching them to the appropriate kafka broker partition. The size of the batch can be controlled by a few config parameters. As events enter a queue, they are buffered in a queue, until eitherqueue.timeorbatch.sizeis reached. A background thread (kafka.producer.async.ProducerSendThread) dequeues the batch of data and lets thekafka.producer.DefaultEventHandlerserialize and send the data to the appropriate kafka broker partition. - handles the serialization of data through a user-specified
Encoder-interface Encoder<T> { public Message toMessage(T data); }The default is the no-op
kafka.serializer.DefaultEncoder - provides zookeeper based automatic broker discovery -
The zookeeper based broker discovery and load balancing can be used by specifying the zookeeper connection url through the
zk.connectconfig parameter. For some applications, however, the dependence on zookeeper is inappropriate. In that case, the producer can take in a static list of brokers through thebroker.listconfig parameter. Each produce requests gets routed to a random broker partition in this case. If that broker is down, the produce request fails. - provides software load balancing through an optionally user-specified
Partitioner-The routing decision is influenced by the
kafka.producer.Partitioner.interface Partitioner<T> { int partition(T key, int numPartitions); }The partition API uses the key and the number of available broker partitions to return a partition id. This id is used as an index into a sorted list of broker_ids and partitions to pick a broker partition for the producer request. The default partitioning strategy ishash(key)%numPartitions. If the key is null, then a random broker partition is picked. A custom partitioning strategy can also be plugged in using thepartitioner.classconfig parameter.
Consumer APIs
We have 2 levels of consumer APIs. The low-level "simple" API maintains a connection to a single broker and has a close correspondence to the network requests sent to the server. This API is completely stateless, with the offset being passed in on every request, allowing the user to maintain this metadata however they choose.
The high-level API hides the details of brokers from the consumer and allows consuming off the cluster of machines without concern for the underlying topology. It also maintains the state of what has been consumed. The high-level API also provides the ability to subscribe to topics that match a filter expression (i.e., either a whitelist or a blacklist regular expression).
Low-level API
class SimpleConsumer {
/* Send fetch request to a broker and get back a set of messages. */
public ByteBufferMessageSet fetch(FetchRequest request);
/* Send a list of fetch requests to a broker and get back a response set. */
public MultiFetchResponse multifetch(List<FetchRequest> fetches);
/**
* Get a list of valid offsets (up to maxSize) before the given time.
* The result is a list of offsets, in descending order.
* @param time: time in millisecs,
* if set to OffsetRequest$.MODULE$.LATIEST_TIME(), get from the latest offset available.
* if set to OffsetRequest$.MODULE$.EARLIEST_TIME(), get from the earliest offset available.
*/
public long[] getOffsetsBefore(String topic, int partition, long time, int maxNumOffsets);
}
The low-level API is used to implement the high-level API as well as being used directly for some of our offline consumers (such as the hadoop consumer) which have particular requirements around maintaining state.
High-level API
/* create a connection to the cluster */
ConsumerConnector connector = Consumer.create(consumerConfig);
interface ConsumerConnector {
/**
* This method is used to get a list of KafkaStreams, which are iterators over
* MessageAndMetadata objects from which you can obtain messages and their
* associated metadata (currently only topic).
* Input: a map of <topic, #streams>
* Output: a map of <topic, list of message streams>
*/
public Map<String,List<KafkaStream>> createMessageStreams(Map<String,Int> topicCountMap);
/**
* You can also obtain a list of KafkaStreams, that iterate over messages
* from topics that match a TopicFilter. (A TopicFilter encapsulates a
* whitelist or a blacklist which is a standard Java regex.)
*/
public List<KafkaStream> createMessageStreamsByFilter(
TopicFilter topicFilter, int numStreams);
/* Commit the offsets of all messages consumed so far. */
public commitOffsets()
/* Shut down the connector */
public shutdown()
}
This API is centered around iterators, implemented by the KafkaStream class. Each KafkaStream represents the stream of messages from one or more partitions on one or more servers. Each stream is used for single threaded processing, so the client can provide the number of desired streams in the create call. Thus a stream may represent the merging of multiple server partitions (to correspond to the number of processing threads), but each partition only goes to one stream.
The createMessageStreams call registers the consumer for the topic, which results in rebalancing the consumer/broker assignment. The API encourages creating many topic streams in a single call in order to minimize this rebalancing. The createMessageStreamsByFilter call (additionally) registers watchers to discover new topics that match its filter. Note that each stream that createMessageStreamsByFilter returns may iterate over messages from multiple topics (i.e., if multiple topics are allowed by the filter).
5.2 Network Layer
The network layer is a fairly straight-forward NIO server, and will not be described in great detail. The sendfile implementation is done by giving the MessageSet interface a writeTo method. This allows the file-backed message set to use the more efficient transferTo implementation instead of an in-process buffered write. The threading model is a single acceptor thread and N processor threads which handle a fixed number of connections each. This design has been pretty thoroughly tested elsewhere and found to be simple to implement and fast. The protocol is kept quite simple to allow for future implementation of clients in other languages.
5.3 Messages
Messages consist of a fixed-size header and variable length opaque byte array payload. The header contains a format version and a CRC32 checksum to detect corruption or truncation. Leaving the payload opaque is the right decision: there is a great deal of progress being made on serialization libraries right now, and any particular choice is unlikely to be right for all uses. Needless to say a particular application using Kafka would likely mandate a particular serialization type as part of its usage. The MessageSet interface is simply an iterator over messages with specialized methods for bulk reading and writing to an NIO Channel.
5.4 Message Format
/** * A message. The format of an N byte message is the following: * * If magic byte is 0 * * 1. 1 byte "magic" identifier to allow format changes * * 2. 4 byte CRC32 of the payload * * 3. N - 5 byte payload * * If magic byte is 1 * * 1. 1 byte "magic" identifier to allow format changes * * 2. 1 byte "attributes" identifier to allow annotations on the message independent of the version (e.g. compression enabled, type of codec used) * * 3. 4 byte CRC32 of the payload * * 4. N - 6 byte payload * */
5.5 Log
A log for a topic named "my_topic" with two partitions consists of two directories (namely my_topic_0 and my_topic_1) populated with data files containing the messages for that topic. The format of the log files is a sequence of "log entries""; each log entry is a 4 byte integer N storing the message length which is followed by the N message bytes. Each message is uniquely identified by a 64-bit integer offset giving the byte position of the start of this message in the stream of all messages ever sent to that topic on that partition. The on-disk format of each message is given below. Each log file is named with the offset of the first message it contains. So the first file created will be 00000000000.kafka, and each additional file will have an integer name roughly S bytes from the previous file where S is the max log file size given in the configuration.
The exact binary format for messages is versioned and maintained as a standard interface so message sets can be transfered between producer, broker, and client without recopying or conversion when desirable. This format is as follows:
On-disk format of a message message length : 4 bytes (value: 1+4+n) "magic" value : 1 byte crc : 4 bytes payload : n bytes
The use of the message offset as the message id is unusual. Our original idea was to use a GUID generated by the producer, and maintain a mapping from GUID to offset on each broker. But since a consumer must maintain an ID for each server, the global uniqueness of the GUID provides no value. Furthermore the complexity of maintaining the mapping from a random id to an offset requires a heavy weight index structure which must be synchronized with disk, essentially requiring a full persistent random-access data structure. Thus to simplify the lookup structure we decided to use a simple per-partition atomic counter which could be coupled with the partition id and node id to uniquely identify a message; this makes the lookup structure simpler, though multiple seeks per consumer request are still likely. However once we settled on a counter, the jump to directly using the offset seemed natural—both after all are monotonically increasing integers unique to a partition. Since the offset is hidden from the consumer API this decision is ultimately an implementation detail and we went with the more efficient approach.
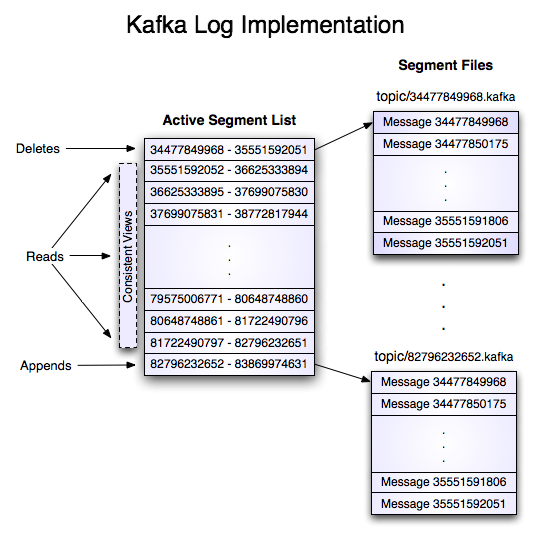
Writes
The log allows serial appends which always go to the last file. This file is rolled over to a fresh file when it reaches a configurable size (say 1GB). The log takes two configuration parameter M which gives the number of messages to write before forcing the OS to flush the file to disk, and S which gives a number of seconds after which a flush is forced. This gives a durability guarantee of losing at most M messages or S seconds of data in the event of a system crash.
Reads
Reads are done by giving the 64-bit logical offset of a message and an S-byte max chunk size. This will return an iterator over the messages contained in the S-byte buffer. S is intended to be larger than any single message, but in the event of an abnormally large message, the read can be retried multiple times, each time doubling the buffer size, until the message is read successfully. A maximum message and buffer size can be specified to make the server reject messages larger than some size, and to give a bound to the client on the maximum it need ever read to get a complete message. It is likely that the read buffer ends with a partial message, this is easily detected by the size delimiting.
The actual process of reading from an offset requires first locating the log segment file in which the data is stored, calculating the file-specific offset from the global offset value, and then reading from that file offset. The search is done as a simple binary search variation against an in-memory range maintained for each file.
The log provides the capability of getting the most recently written message to allow clients to start subscribing as of "right now". This is also useful in the case the consumer fails to consume its data within its SLA-specified number of days. In this case when the client attempts to consume a non-existant offset it is given an OutOfRangeException and can either reset itself or fail as appropriate to the use case.
The following is the format of the results sent to the consumer.
MessageSetSend (fetch result) total length : 4 bytes error code : 2 bytes message 1 : x bytes ... message n : x bytes
MultiMessageSetSend (multiFetch result) total length : 4 bytes error code : 2 bytes messageSetSend 1 ... messageSetSend n
Deletes
Data is deleted one log segment at a time. The log manager allows pluggable delete policies to choose which files are eligible for deletion. The current policy deletes any log with a modification time of more than N days ago, though a policy which retained the last N GB could also be useful. To avoid locking reads while still allowing deletes that modify the segment list we use a copy-on-write style segment list implementation that provides consistent views to allow a binary search to proceed on an immutable static snapshot view of the log segments while deletes are progressing.
Guarantees
The log provides a configuration parameter M which controls the maximum number of messages that are written before forcing a flush to disk. On startup a log recovery process is run that iterates over all messages in the newest log segment and verifies that each message entry is valid. A message entry is valid if the sum of its size and offset are less than the length of the file AND the CRC32 of the message payload matches the CRC stored with the message. In the event corruption is detected the log is truncated to the last valid offset.
Note that two kinds of corruption must be handled: truncation in which an unwritten block is lost due to a crash, and corruption in which a nonsense block is ADDED to the file. The reason for this is that in general the OS makes no guarantee of the write order between the file inode and the actual block data so in addition to losing written data the file can gain nonsense data if the inode is updated with a new size but a crash occurs before the block containing that data is not written. The CRC detects this corner case, and prevents it from corrupting the log (though the unwritten messages are, of course, lost).
5.6 Distribution
Zookeeper Directories
The following gives the zookeeper structures and algorithms used for co-ordination between consumers and brokers.
Notation
When an element in a path is denoted [xyz], that means that the value of xyz is not fixed and there is in fact a zookeeper znode for each possible value of xyz. For example /topics/[topic] would be a directory named /topics containing a sub-directory for each topic name. Numerical ranges are also given such as [0...5] to indicate the subdirectories 0, 1, 2, 3, 4. An arrow -> is used to indicate the contents of a znode. For example /hello -> world would indicate a znode /hello containing the value "world".
Broker Node Registry
/brokers/ids/[0...N] --> host:port (ephemeral node)
This is a list of all present broker nodes, each of which provides a unique logical broker id which identifies it to consumers (which must be given as part of its configuration). On startup, a broker node registers itself by creating a znode with the logical broker id under /brokers/ids. The purpose of the logical broker id is to allow a broker to be moved to a different physical machine without affecting consumers. An attempt to register a broker id that is already in use (say because two servers are configured with the same broker id) is an error.
Since the broker registers itself in zookeeper using ephemeral znodes, this registration is dynamic and will disappear if the broker is shutdown or dies (thus notifying consumers it is no longer available).
Broker Topic Registry
/brokers/topics/[topic]/[0...N] --> nPartions (ephemeral node)
Each broker registers itself under the topics it maintains and stores the number of partitions for that topic.
Consumers and Consumer Groups
Consumers of topics also register themselves in Zookeeper, in order to balance the consumption of data and track their offsets in each partition for each broker they consume from.
Multiple consumers can form a group and jointly consume a single topic. Each consumer in the same group is given a shared group_id. For example if one consumer is your foobar process, which is run across three machines, then you might assign this group of consumers the id "foobar". This group id is provided in the configuration of the consumer, and is your way to tell the consumer which group it belongs to.
The consumers in a group divide up the partitions as fairly as possible, each partition is consumed by exactly one consumer in a consumer group.
Consumer Id Registry
In addition to the group_id which is shared by all consumers in a group, each consumer is given a transient, unique consumer_id (of the form hostname:uuid) for identification purposes. Consumer ids are registered in the following directory.
/consumers/[group_id]/ids/[consumer_id] --> {"topic1": #streams, ..., "topicN": #streams} (ephemeral node)
Each of the consumers in the group registers under its group and creates a znode with its consumer_id. The value of the znode contains a map of <topic, #streams>. This id is simply used to identify each of the consumers which is currently active within a group. This is an ephemeral node so it will disappear if the consumer process dies.
Consumer Offset Tracking
Consumers track the maximum offset they have consumed in each partition. This value is stored in a zookeeper directory
/consumers/[group_id]/offsets/[topic]/[partition_id] --> offset_counter_value ((persistent node)
Partition Owner registry
Each broker partition is consumed by a single consumer within a given consumer group. The consumer must establish its ownership of a given partition before any consumption can begin. To establish its ownership, a consumer writes its own id in an ephemeral node under the particular broker partition it is claiming.
/consumers/[group_id]/owners/[topic]/[partition_id] --> consumer_node_id (ephemeral node)
Broker node registration
The broker nodes are basically independent, so they only publish information about what they have. When a broker joins, it registers itself under the broker node registry directory and writes information about its host name and port. The broker also register the list of existing topics and their logical partitions in the broker topic registry. New topics are registered dynamically when they are created on the broker.
Consumer registration algorithm
When a consumer starts, it does the following:
- Register itself in the consumer id registry under its group.
- Register a watch on changes (new consumers joining or any existing consumers leaving) under the consumer id registry. (Each change triggers rebalancing among all consumers within the group to which the changed consumer belongs.)
- Register a watch on changes (new brokers joining or any existing brokers leaving) under the broker id registry. (Each change triggers rebalancing among all consumers in all consumer groups.)
- If the consumer creates a message stream using a topic filter, it also registers a watch on changes (new topics being added) under the broker topic registry. (Each change will trigger re-evaluation of the available topics to determine which topics are allowed by the topic filter. A new allowed topic will trigger rebalancing among all consumers within the consumer group.)
- Force itself to rebalance within in its consumer group.
Consumer rebalancing algorithm
The consumer rebalancing algorithms allows all the consumers in a group to come into consensus on which consumer is consuming which partitions. Consumer rebalancing is triggered on each addition or removal of both broker nodes and other consumers within the same group. For a given topic and a given consumer group, broker partitions are divided evenly among consumers within the group. A partition is always consumed by a single consumer. This design simplifies the implementation. Had we allowed a partition to be concurrently consumed by multiple consumers, there would be contention on the partition and some kind of locking would be required. If there are more consumers than partitions, some consumers won't get any data at all. During rebalancing, we try to assign partitions to consumers in such a way that reduces the number of broker nodes each consumer has to connect to.
Each consumer does the following during rebalancing:
1. For each topic T that Ci subscribes to
2. let PT be all partitions producing topic T
3. let CG be all consumers in the same group as Ci that consume topic T
4. sort PT (so partitions on the same broker are clustered together)
5. sort CG
6. let i be the index position of Ci in CG and let N = size(PT)/size(CG)
7. assign partitions from i*N to (i+1)*N - 1 to consumer Ci
8. remove current entries owned by Ci from the partition owner registry
9. add newly assigned partitions to the partition owner registry
(we may need to re-try this until the original partition owner releases its ownership)
When rebalancing is triggered at one consumer, rebalancing should be triggered in other consumers within the same group about the same time.
6. Operations
Here is some information on actually running Kafka as a production system based on usage and experience at LinkedIn. Please send us any additional tips you know of.6.1 Datacenters
Some deployments will need to manage a data pipeline that spans multiple datacenters. Our approach to this is to deploy a local Kafka cluster in each datacenter and machines in each location interact only with their local cluster.For applications that need a global view of all data we use the mirror maker tool to provide clusters which have aggregate data mirrored from all datacenters. These aggregator clusters are used for reads by applications that require this.
Likewise in order to support data load into Hadoop which resides in separate facilities we provide local read-only clusters that mirror the production data centers in the facilities where this data load occurs.
This allows each facility to stand alone and operate even if the inter-datacenter links are unavailable: when this occurs the mirroring falls behind until the link is restored at which time it catches up.
This deployment pattern allows datacenters to act as independent entities and allows us to manage and tune inter-datacenter replication centrally.
This is not the only possible deployment pattern. It is possible to read from or write to a remote Kafka cluster over the WAN though TCP tuning will be necessary for high-latency links.
It is generally not advisable to run a single Kafka cluster that spans multiple datacenters as this will incur very high replication latency both for Kafka writes and Zookeeper writes and neither Kafka nor Zookeeper will remain available if the network partitions.
6.2 Kafka Configuration
Kafka 0.8 is the version we currently run. We are currently running with replication but with producers acks = 1.
Important Server Configurations
The most important server configurations for performance are those that control the disk flush rate. The more often data is flushed to disk, the more "seek-bound" Kafka will be and the lower the throughput. However very low application flush rates can lead to high latency when the flush finally does occur (because of the volume of data that must be flushed). See the section below on application versus OS flush.Important Client Configurations
The most important producer configurations control- compression
- sync vs async production>
- batch size (for async producers)
All configurations are documented in the configuration section.
A Production Server Config
Here is our server production server configuration:# Replication configurations num.replica.fetchers=4 replica.fetch.max.bytes=1048576 replica.fetch.wait.max.ms=500 replica.high.watermark.checkpoint.interval.ms=5000 replica.socket.timeout.ms=30000 replica.socket.receive.buffer.bytes=65536 replica.lag.time.max.ms=10000 replica.lag.max.messages=4000 controller.socket.timeout.ms=30000 controller.message.queue.size=10 # Log configuration num.partitions=8 message.max.bytes=1000000 auto.create.topics.enable=true log.index.interval.bytes=4096 log.index.size.max.bytes=10485760 log.retention.hours=168 log.flush.interval.ms=10000 log.flush.interval.messages=20000 log.flush.scheduler.interval.ms=2000 log.roll.hours=168 log.retention.check.interval.ms=300000 log.segment.bytes=1073741824 # ZK configuration zk.connection.timeout.ms=6000 zk.sync.time.ms=2000 # Socket server configuration num.io.threads=8 num.network.threads=8 socket.request.max.bytes=104857600 socket.receive.buffer.bytes=1048576 socket.send.buffer.bytes=1048576 queued.max.requests=16 fetch.purgatory.purge.interval.requests=100 producer.purgatory.purge.interval.requests=100Our client configuration varies a fair amount between different use cases.
Java Version
Any version of Java 1.6 or later should work fine, we are using 1.6.0_21. Here are our command line options:
java -server -Xms3072m -Xmx3072m -XX:NewSize=256m -XX:MaxNewSize=256m -XX:+UseParNewGC -XX:+UseConcMarkSweepGC
-XX:+UseCMSInitiatingOccupancyOnly -XX:+CMSConcurrentMTEnabled -XX:+CMSScavengeBeforeRemark
-XX:CMSInitiatingOccupancyFraction=30
-XX:+PrintGCDetails -XX:+PrintGCDateStamps -XX:+PrintTenuringDistribution
-Xloggc:logs/gc.log -Djava.awt.headless=true
-Dcom.sun.management.jmxremote -classpath <long list of jars> the.actual.Class
6.4 Hardware and OS
We are using dual quad-core Intel Xeon machines with 24GB of memory.You need sufficient memory to buffer active readers and writers. You can do a back-of-the-envelope estimate of memory needs by assuming you want to be able to buffer for 30 seconds and compute your memory need as write_throughput*30.
The disk throughput is important. We have 8x7200 rpm SATA drives. In general disk throughput is the performance bottleneck, and more disks is more better. Depending on how you configure flush behavior you may or may not benefit from more expensive disks (if you force flush often then higher RPM SAS drives may be better).
OS
Kafka should run well on any unix system and has been tested on Linux and Solaris.We have seen a few issues running on Windows and Windows is not currently a well supported platform though we would be happy to change that.
You likely don't need to do much OS-level tuning though there are a few things that will help performance.
Two configurations that may be important:
- We upped the number of file descriptors since we have lots of topics and lots of connections.
- We upped the max socket buffer size to enable high-performance data transfer between data centers described here.
Disks and Filesystem
We recommend using multiple drives to get good throughput and not sharing the same drives used for Kafka data with application logs or other OS filesystem activity to ensure good latency. As of 0.8 you can either RAID these drives together into a single volume or format and mount each drive as its own directory. Since Kafka has replication the redundancy provided by RAID can also be provided at the application level. This choice has several tradeoffs.If you configure multiple data directories partitions will be assigned round-robin to data directories. Each partition will be entirely in one of the data directories. If data is not well balanced among partitions this can lead to load imbalance between disks.
RAID can potentially do better at balancing load between disks (although it doesn't always seem to) because it balances load at a lower level. The primary downside of RAID is that it is usually a big performance hit for write throughput and reduces the available disk space.
Another potential benefit of RAID is the ability to tolerate disk failures. However our experience has been that rebuilding the RAID array is so I/O intensive that it effectively disables the server, so this does not provide much real availability improvement.
Application vs. OS Flush Management
Kafka always immediately writes all data to the filesystem and supports the ability to configure the flush policy that controls when data is forced out of the OS cache and onto disk using the and flush. This flush policy can be controlled to force data to disk after a period of time or after a certain number of messages has been written. There are several choices in this configuration.Kafka must eventually call fsync to know that data was flushed. When recovering from a crash for any log segment not known to be fsync'd Kafka will check the integrity of each message by checking its CRC and also rebuild the accompanying offset index file as part of the recovery process executed on startup.
This frequency of application-level fsyncs has a large impact on both latency and throughput. Setting a large flush interval will improve throughput as the operating system can buffer the many small writes into a single large write. This works effectively even across many partitions all taking simultaneous writes provided enough memory is available for buffering. However doing this may have a significant impact on latency as in many filesystems (including ext2, ext3, and ext4) fsync is an operation which blocks all writes to the file. Because of this allowing lots of data to accumulate and then calling flush can lead to large write latencies as new writes on that partition will be blocked as lots of accumulated data is flushed to disk.
In 0.8 we support replication as a way to ensure that data that is written is durable in the face of server crashes. As a result we allow giving out data to consumers immediately and the flush interval does not impact consumer latency. However we still MUST flush each log segment when the log rolls over to a new segment. So although you can set a relatively lenient flush interval setting no flush interval at all will lead to a full segment's worth of data being flushed all at once which can be quite slow. After 0.8 we improved our recovery procedure which allows us to avoid the blocking fsync when the log rolls. As a result in all releases after 0.8 we recommend using replication and not setting any application level flush settings---relying only on the OS and Kafka's own background flush. This provides the best of all worlds for most uses: no knobs to tune, great throughput and latency, and full recovery guarantees. We generally feel that the guarantees provided by replication are stronger than sync to local disk, however the paranoid still may prefer having both and application level fsync policies are still supported.
In general you don't need to do any low-level tuning of the filesystem, but in the next few sections we will go over some of this in case it is useful.
Understanding Linux OS Flush Behavior
In Linux, data written to the filesystem is maintained in pagecache until it must be written out to disk (due to an application-level fsync or the OS's own flush policy). The flushing of data is done by a set of background threads called pdflush (or in post 2.6.32 kernels "flusher threads").Pdflush has a configurable policy that controls how much dirty data can be maintained in cache and for how long before it must be written back to disk. This policy is described here. When Pdflush cannot keep up with the rate of data being written it will eventually cause the writing process to block incurring latency in the writes to slow down the accumulation of data.
You can see the current state of OS memory usage by doing
cat /proc/meminfoThe meaning of these values are described in the link above.
Using pagecache has several advantages over an in-process cache for storing data that will be written out to disk:
- The I/O scheduler will batch together consecutive small writes into bigger physical writes which improves throughput.
- The I/O scheduler will attempt to re-sequence writes to minimize movement of the disk head which improves throughput.
- It automatically uses all the free memory on the machine
Ext4 Notes
Ext4 may or may not be the best filesystem for Kafka. Filesystems like XFS supposedly handle locking during fsync better. We have only tried Ext4, though.It is not necessary to tune these settings, however those wanting to optimize performance have a few knobs that will help:
- data=writeback: Ext4 defaults to data=ordered which puts a strong order on some writes. Kafka does not require this ordering as it does very paranoid data recovery on all unflushed log. This setting removes the ordering constraint and seems to significantly reduce latency.
- Disabling journaling: Journaling is a tradeoff: it makes reboots faster after server crashes but it introduces a great deal of additional locking which adds variance to write performance. Those who don't care about reboot time and want to reduce a major source of write latency spikes can turn off journaling entirely.
- commit=num_secs: This tunes the frequency with which ext4 commits to its metadata journal. Setting this to a lower value reduces the loss of unflushed data during a crash. Setting this to a higher value will improve throughput.
- nobh: This setting controls additional ordering guarantees when using data=writeback mode. This should be safe with Kafka as we do not depend on write ordering and improves throughput and latency.
- delalloc: Delayed allocation means that the filesystem avoid allocating any blocks until the physical write occurs. This allows ext4 to allocate a large extent instead of smaller pages and helps ensure the data is written sequentially. This feature is great for throughput. It does seem to involve some locking in the filesystem which adds a bit of latency variance.
6.5 Monitoring
Kafka uses Yammer Metrics for metrics reporting in both the server and the client. This can be configured to report stats using pluggable stats reporters to hook up to your monitoring system.The easiest way to see the available metrics to fire up jconsole and point it at a running kafka client or server; this will all browsing all metrics with JMX.
We pay particular we do graphing and alerting on the following metrics:
| Description | Mbean name | Normal value |
|---|---|---|
| Message in rate | "kafka.server":name="AllTopicsMessagesInPerSec", type="BrokerTopicMetrics" | |
| Byte in rate | "kafka.server":name="AllTopicsBytesInPerSec",type="BrokerTopicMetrics" | |
| Request rate | "kafka.network":name="{Produce|Fetch-consumer|Fetch-follower}-RequestsPerSec",type="RequestMetrics" | |
| Byte out rate | "kafka.server":name="AllTopicsBytesOutPerSec", type="BrokerTopicMetrics" | |
| Log flush rate and time | "kafka.log":name="LogFlushRateAndTimeMs",type="LogFlushStats" | |
| # of under replicated partitions (|ISR| < |all replicas|) | "kafka.server":name="UnderReplicatedPartitions",type="ReplicaManager" | 0 |
| Is controller active on broker | "kafka.controller":name="ActiveControllerCount",type="KafkaController" | only one broker in the cluster should have 1 |
| Leader election rate | "kafka.controller":name="LeaderElectionRateAndTimeMs", type="ControllerStats" | non-zero when there are broker failures |
| Unclean leader election rate | "kafka.controller":name="UncleanLeaderElectionsPerSec", type="ControllerStats" | 0 |
| Partition counts | "kafka.server":name="PartitionCount",type="ReplicaManager" | mostly even across brokers |
| Leader replica counts | "kafka.server":name="LeaderCount",type="ReplicaManager" | mostly even across brokers |
| ISR shrink rate | "kafka.server":name="ISRShrinksPerSec",type="ReplicaManager" | If a broker goes down, ISR for some of the partitions will shrink. When that broker is up again, ISR will be expanded once the replicas are fully caught up. Other than that, the expected value for both ISR shrink rate and expansion rate is 0. |
| ISR expansion rate | "kafka.server":name="ISRExpandsPerSec",type="ReplicaManager" | See above |
| Max lag in messages btw follower and leader replicas | "kafka.server":name="([-.\w]+)-MaxLag",type="ReplicaFetcherManager" | < replica.lag.max.messages |
| Lag in messages per follower replica | "kafka.server":name="([-.\w]+)-ConsumerLag",type="FetcherLagMetrics" | < replica.lag.max.messages |
| Requests waiting in the producer purgatory | "kafka.server":name="PurgatorySize",type="ProducerRequestPurgatory" | non-zero if ack=-1 is used |
| Requests waiting in the fetch purgatory | "kafka.server":name="PurgatorySize",type="FetchRequestPurgatory" | size depends on fetch.wait.max.ms in the consumer |
| Request total time | "kafka.network":name="{Produce|Fetch-Consumer|Fetch-Follower}-TotalTimeMs",type="RequestMetrics" | broken into queue, local, remote and response send time |
| Time the request waiting in the request queue | "kafka.network":name="{Produce|Fetch-Consumer|Fetch-Follower}-QueueTimeMs",type="RequestMetrics" | |
| Time the request being processed at the leader | "kafka.network":name="{Produce|Fetch-Consumer|Fetch-Follower}-LocalTimeMs",type="RequestMetrics" | |
| Time the request waits for the follower | "kafka.network":name="{Produce|Fetch-Consumer|Fetch-Follower}-RemoteTimeMs",type="RequestMetrics" | non-zero for produce requests when ack=-1 |
| Time to send the response | "kafka.network":name="{Produce|Fetch-Consumer|Fetch-Follower}-ResponseSendTimeMs",type="RequestMetrics" | |
| Number of messages the consumer lags behind the broker among all partitions consumed | "kafka.consumer":name="([-.\w]+)-MaxLag",type="ConsumerFetcherManager" | small and not growing |
| The min fetch rate among all fetchers to brokers in a consumer | "kafka.consumer":name="([-.\w]+)-MinFetch",type="ConsumerFetcherManager" | >= 1000/fetch.wait.max.ms |
Audit
The final alerting we do is on the correctness of the data delivery. We audit that every message that is sent is consumed by all consumers and measure the lag for this to occur. For important topics we alert if a certain completeness is not achieved in a certain time period. The details of this are discussed in KAFKA-260.6.6 Zookeeper
Stable version
At LinkedIn, we are running Zookeeper 3.3.*. Version 3.3.3 has known serious issues regarding ephemeral node deletion and session expirations. After running into those issues in production, we upgraded to 3.3.4 and have been running that smoothly for over a year now.Operationalizing Zookeeper
Operationally, we do the following for a healthy Zookeeper installation:Redundancy in the physical/hardware/network layout: try not to put them all in the same rack, decent (but don't go nuts) hardware, try to keep redundant power and network paths, etc
I/O segregation: if you do a lot of write type traffic you'll almost definitely want the transaction logs on a different disk group than application logs and snapshots (the write to the Zookeeper service has a synchronous write to disk, which can be slow).
Application segregation: Unless you really understand the application patterns of other apps that you want to install on the same box, it can be a good idea to run Zookeeper in isolation (though this can be a balancing act with the capabilities of the hardware). Use care with virtualization: It can work, depending on your cluster layout and read/write patterns and SLAs, but the tiny overheads introduced by the virtualization layer can add up and throw off Zookeeper, as it can be very time sensitive
Zookeeper configuration and monitoring: It's java, make sure you give it 'enough' heap space (We usually run them with 3-5G, but that's mostly due to the data set size we have here). Unfortunately we don't have a good formula for it. As far as monitoring, both JMX and the 4 letter words (4lw) commands are very useful, they do overlap in some cases (and in those cases we prefer the 4 letter commands, they seem more predictable, or at the very least, they work better with the LI monitoring infrastructure) Don't overbuild the cluster: large clusters, especially in a write heavy usage pattern, means a lot of intracluster communication (quorums on the writes and subsequent cluster member updates), but don't underbuild it (and risk swamping the cluster).
Try to run on a 3-5 node cluster: Zookeeper writes use quorums and inherently that means having an odd number of machines in a cluster. Remember that a 5 node cluster will cause writes to slow down compared to a 3 node cluster, but will allow more fault tolerance.
Overall, we try to keep the Zookeeper system as small as will handle the load (plus standard growth capacity planning) and as simple as possible. We try not to do anything fancy with the configuration or application layout as compared to the official release as well as keep it as self contained as possible. For these reasons, we tend to skip the OS packaged versions, since it has a tendency to try to put things in the OS standard hierarchy, which can be 'messy', for want of a better way to word it.